项目作品
以技术创新驱动业务价值,以下是我在机器人控制、视觉系统和软件开发领域的代表性项目
精选项目
全部项目
精选
精选
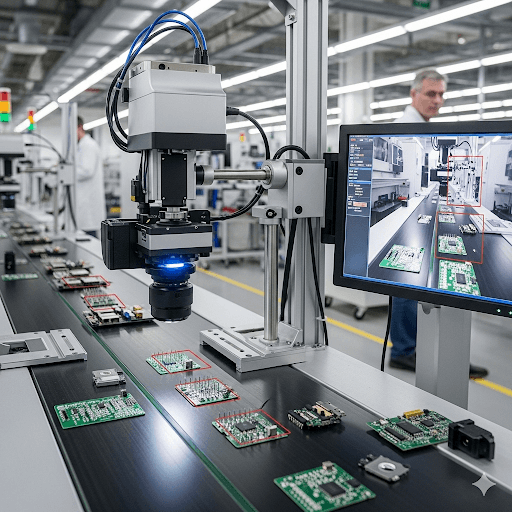
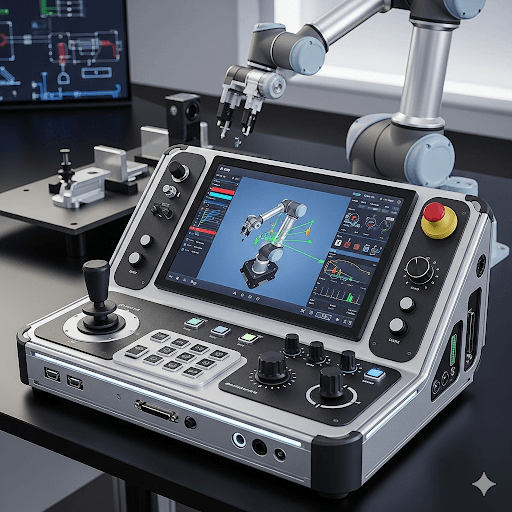
协作机器人控制平台
为UR机器人开发的通用控制平台,支持多任务并发执行和可视化编程。提供直观的拖拽式编程界面,让非技术人员也能轻松操作机器人,提升生产效率40%。
UR RobotPythonROSQt多线程
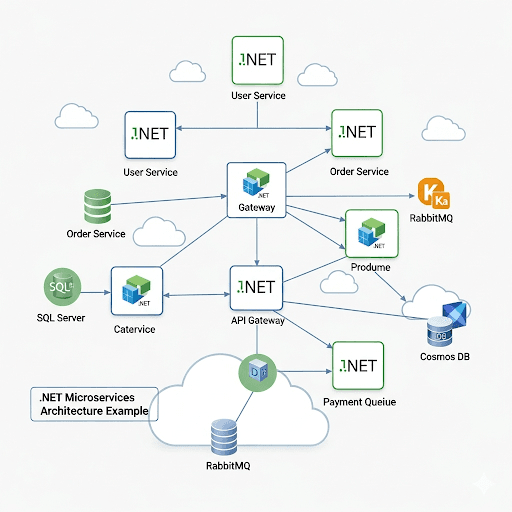
.NET微服务架构
企业级微服务解决方案,采用Docker容器化部署,支持高并发和弹性扩展。为制造业数字化转型提供技术支撑,处理日均百万级业务请求。
.NET CoreDocker微服务AzureRedis
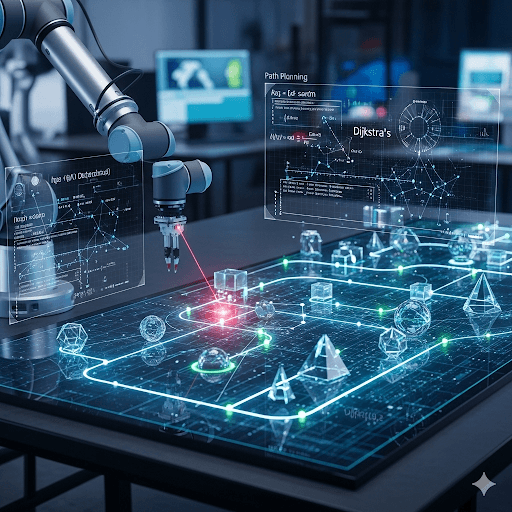
机器人路径规划算法
基于改进A*算法的机器人路径规划系统,结合动态避障技术,在复杂工业环境中实现高效、安全的机器人运动控制。
算法优化路径规划C++OpenGL数学建模
自动化测试框架
为机器人控制系统开发的自动化测试框架,支持单元测试、集成测试和性能测试。大幅提升软件质量和开发效率。
自动化测试CI/CDPythonJenkins测试框架
对我的项目感兴趣?
如果您想了解更多项目细节,或者有类似的项目需求,欢迎与我联系讨论合作机会