
楚子航 (Kairos)
机器人工程师 & .NET全栈开发者
专业的机器人工程师和.NET全栈开发者,致力于用技术创新推动工业智能化发展。
核心技能
KUKA机器人UR协作机器人C# .NETPython视觉控制运动规划PLC集成工业自动化
精选项目
以下是我近期完成的一些代表性项目,展示了在机器人控制和软件开发方面的专业能力
精选
精选
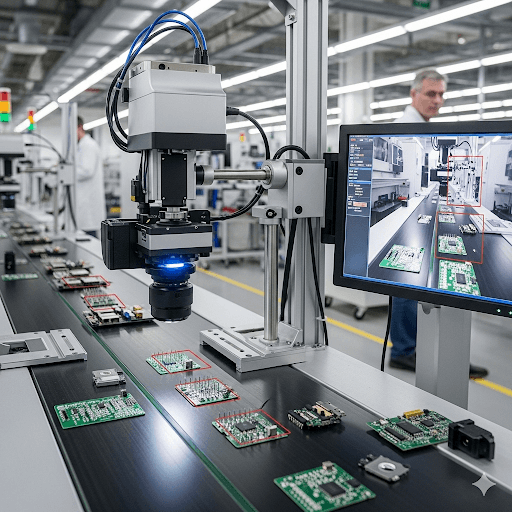
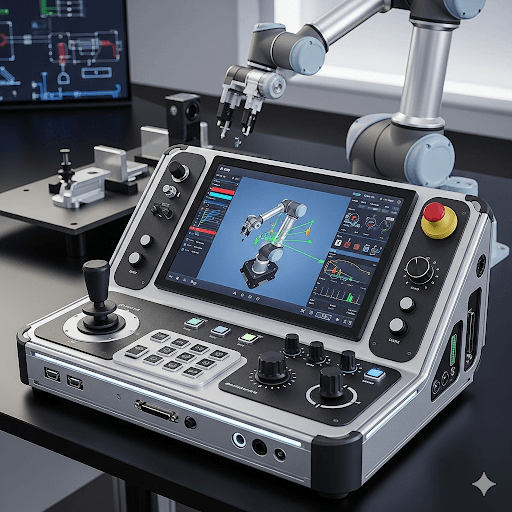
协作机器人控制平台
为UR机器人开发的通用控制平台,支持多任务并发执行和可视化编程。提供直观的拖拽式编程界面,让非技术人员也能轻松操作机器人,提升生产效率40%。
UR RobotPythonROSQt多线程